Avvicinare i bambini alla robotica per aiutarli a comprendere meglio il mondo reale, rendendoli allo stesso tempo consapevoli che spesso le macchine e i robot sono costruiti e programmati prendendo a modello il funzionamento di elementi della natura è possibile?
Io ci ho provato realizzando un piccolo pipistrello “in scatola”, Bat Box Bot, che utilizza il sensore ad ultrasuoni per individuare le prede e “volare” a caccia di cibo, proprio come in natura.

La storia di come gli scienziati siano arrivati a capire che i pipistrelli utilizzano l’ecolocazione ad ultrasuoni è molto interessante e può costituire il punto di partenza per introdurre l’argomento dal punto di vista scientifico.
La scoperta che il pipistrello emette con regolarità impulsi ultrasonori che ritornano come un’eco quando incontrano un ostacolo diventerà occasione poi per presentare il sensore HC-SR04 e il suo funzionamento, anche se in maniera semplificata.
Nella progettazione del Bat Box Bot è stata inserita inoltre una matrice a led, che ci consente di avere un feedback visivo dello stato del sistema, dotando di espressione il robot, e un buzzer per l’emissione di suoni.
Due servomotori sono necessari per il movimento delle ali (qui il disegno), realizzate in cartoncino e sostenute da abbassalingua.
{kind=link}
Il “cervello” operativo del robot è una scheda Arduino Uno, programmata con un’interfaccia visuale a blocchi grazie all’estensione Ottodiy per mBlock.
MATERIALE

1 sensore HC-SR04
1 matrice a led Max7219
2 servomotori sg90
1 buzzer
1 scheda Arduino Uno
Cavi jumper Dupont maschio-maschio e maschio-femmina
1 breadboard (è sufficiente la sezione laterale ground/vcc)
1 scatola di cartone di dimensioni circa 10×15 cm, profondità 4 cm
2 abbassalingua
Cartoncino nero per le ali e per ricoprire la scatola (qui lo schema per i fori), che può anche essere verniciata con una bomboletta spray.
{kind=link}
SCHEMA DI COLLEGAMENTO

PROGRAMMA IN MBLOCK
Un primo programma da utilizzare in fase di test per il montaggio, che si può migliorare e perfezionare in seguito, può essere questo:
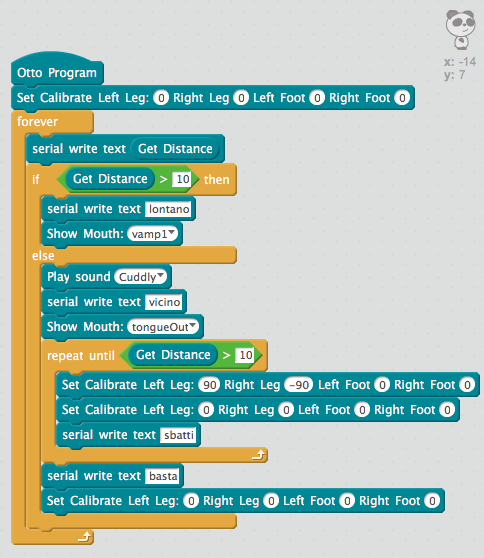
Nel programma sono presenti istruzioni che scrivono i dati rilevati dal sensore e lo stato dell’esecuzione per permettere di capirne meglio il funzionamento quando la scheda è collegata ad mBlock tramite un computer.
L’istruzione “Set Calibrate” permette di controllare la posizione dei 4 servomotori presenti nel robot Otto. In questo caso vengono utilizzati solo i campi “Left Leg, Right Leg” per il movimento delle ali, che sono collegate ai pin corrispondenti ai servomotori della gamba destra e sinistra di un Otto.
ISTRUZIONI PASSO PASSO

Bat Box Bot è distribuito con Licenza Creative Commons Attribuzione – Non commerciale – Condividi allo stesso modo 4.0 Internazionale.